Real2Sim
When having a robotics pipeline that works in the real world is not enough, going back in simulation can help. 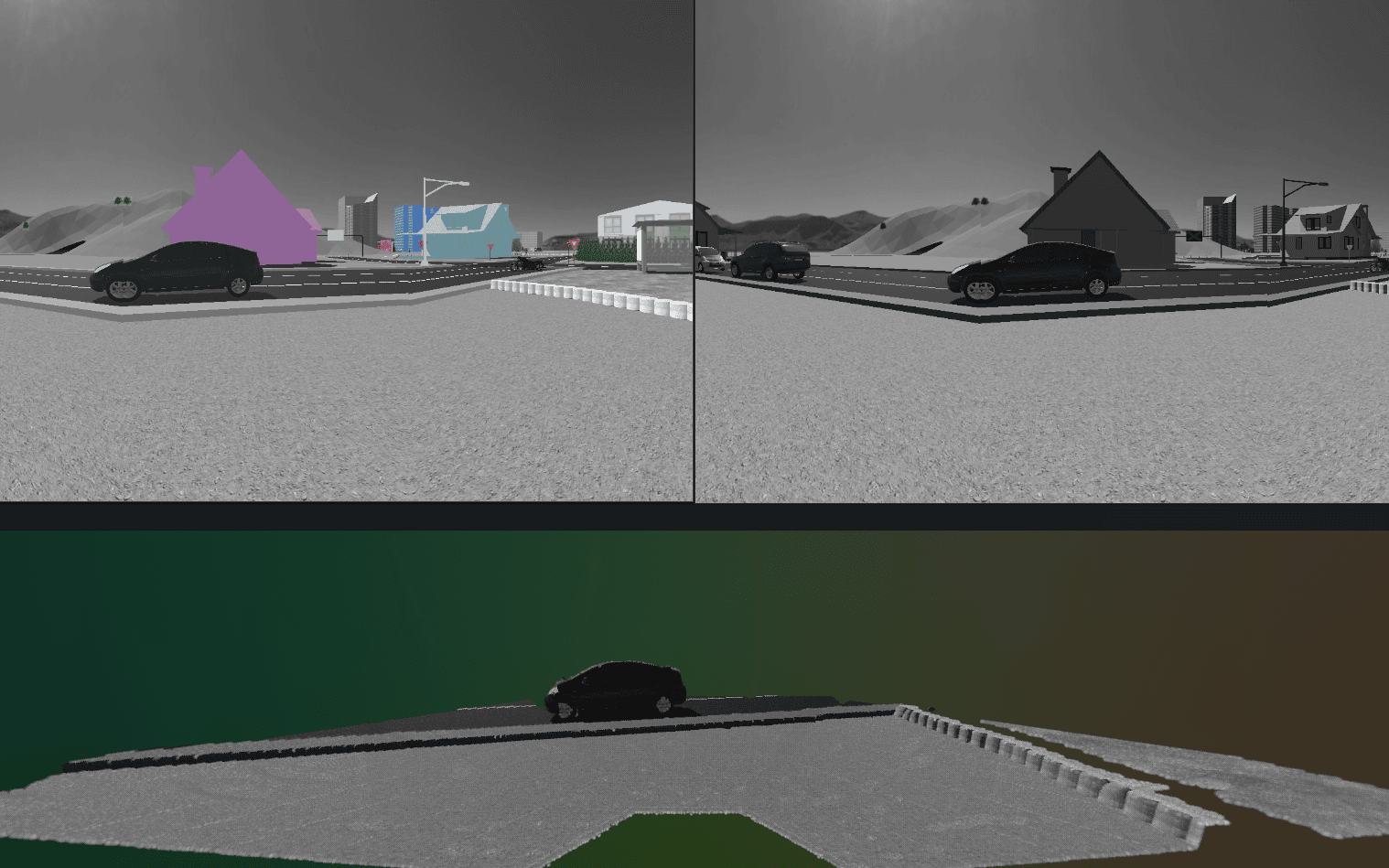 ’
’

When having a robotics pipeline that works in the real world is not enough, going back in simulation can help. ’
Obstacle detection and crossing for a legged-wheeled robot, motivated selection of a depth sensor and real world experiments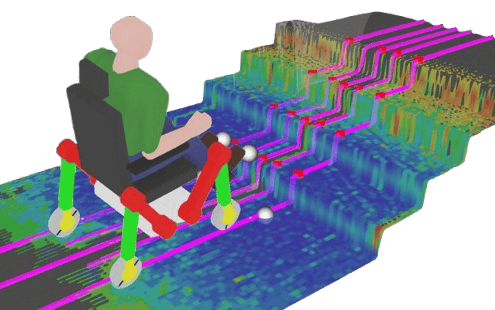
Study of the stability of a bio-inspired human locomotion model and development of an optimisation framework to reproduce pathological gaits 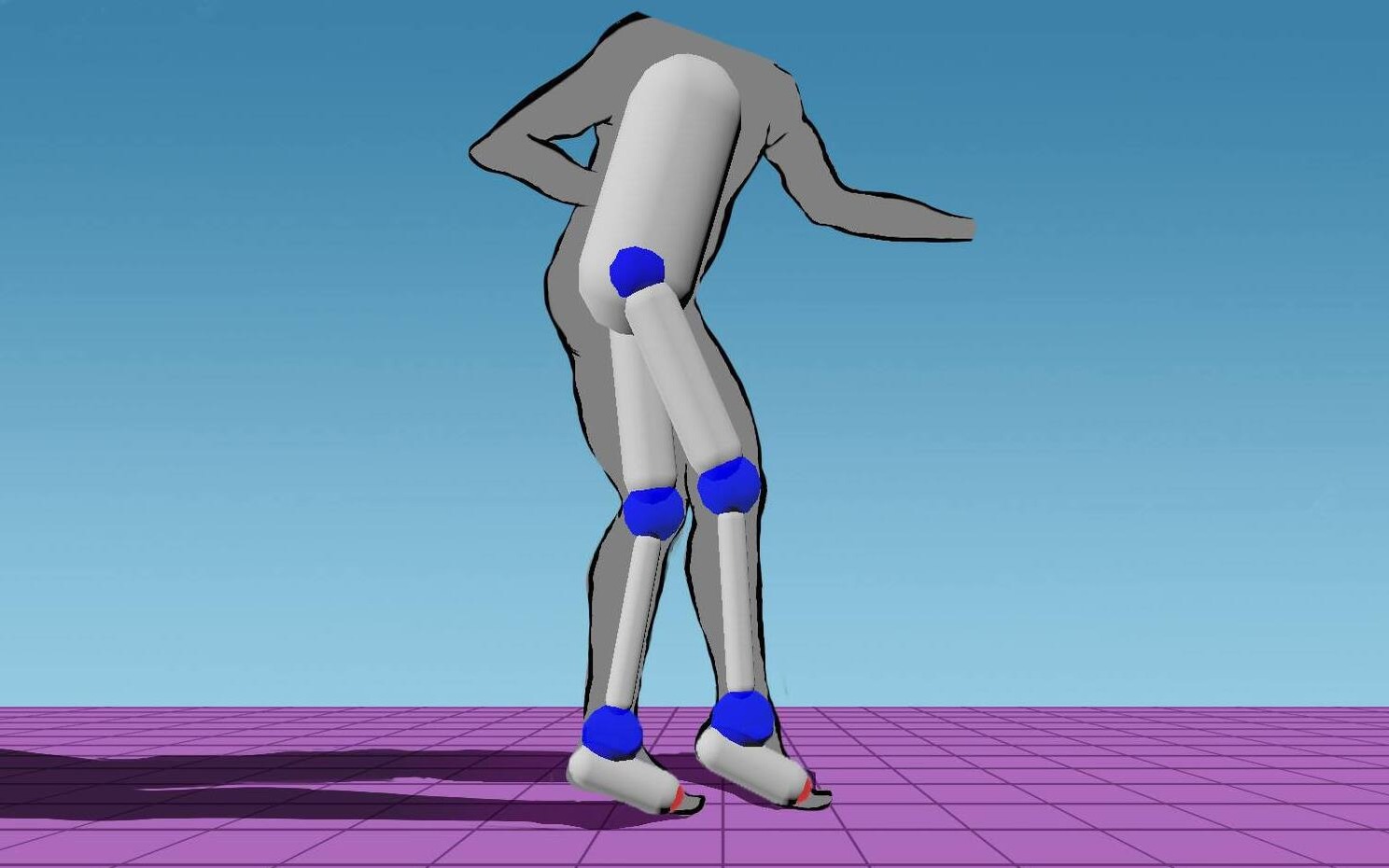
Implentation and testing of human robot interactions (HRI) to improve the realisation of navigation tasks in a social environment 
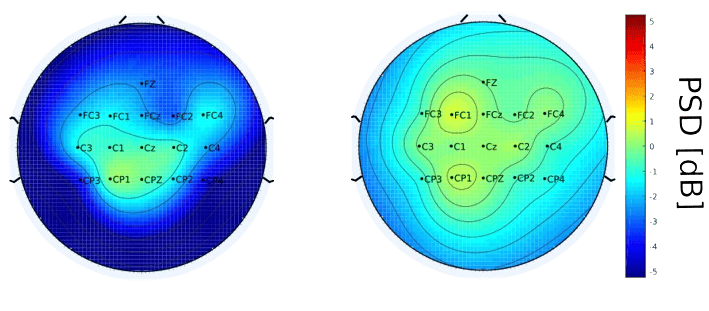
Acquisition, processing and classification of EEG data to detect the a motor imagery termination event